Framework Usage
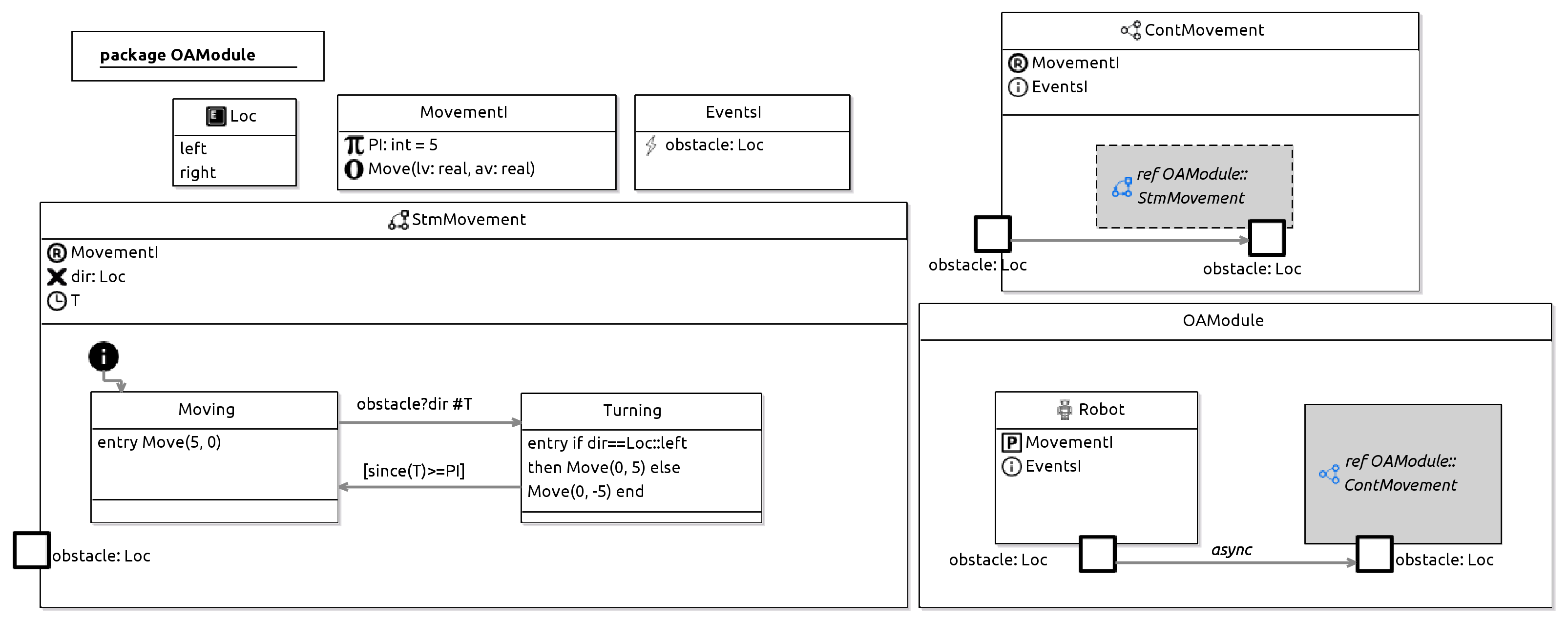
A package called OAModule is created. This package defines a module OAModule,and the module includes a robotic platform Robotand a controller ContMovement. The robot provides one interface MovementI and uses one interface EventsI.The first interface groups the operation Move and a const variable PI, and the second interface groups event obstacle. The robotic platform is composed of a controller ContMovement that contains the state machine StmMovement. The state machine declares a variable dir and the clock T . It consists of two states (Moving and Turning), and the first uses the operation to move the robot forward. If an obstacle is found, the clock is reset and the state Turning is entered. In the Turning state, the robot starts turning based on the location of the obstacle, and if the time passed a certain threshold PI, the robot enters the Moving state again.
Module
The Module class instantiates the robot, the controller and all the channels used in the model.
//OAModule.h
class OAModule {
public:
OAModule() :
OAModule_Robot(nullptr),
OAModule_ContMovement(nullptr),
obstacle(std::make_shared<robochart::obstacle_channel>("obstacle")) {}
virtual ~OAModule() {};
void Init();
void Execute();
private:
std::shared_ptr<robochart::obstacle_channel> obstacle;
std::shared_ptr<Robot> OAModule_Robot;
std::shared_ptr<ContMovement> OAModule_ContMovement;
};
It also implements the functionsInitand Execute. Init function instantiates the OAModule_Robot and OAModule_ContMovementclass. This function can also be extended to pass initial parameters to the robot and controller. In ARGoS, this is done via reading a XML file using the Init function. The function Execute executes the sensors of the robot, the behaviour of the controller and then executes the actuators of the robot. This function can be executed in the step function of a particular simulator. In ARGoS, the step function is called ControlStep().
RobotHardware
The HardwareComponentclass is a abstract class that include two virtual functions Sense() and Actuate(). These two functions need to be extended.
//HardwareComponent.h
class HardwareComponent {
public:
HardwareComponent() {}
virtual ~HardwareComponent() {}
virtual void Sense() = 0;
virtual void Actuate() = 0;
};
Interface
Each of the interfaces is declared as a class that implementsHardwareComponent.
//EventsI.h
class EventsI : public HardwareComponent {
public:
EventsI(std::shared_ptr<robochart::obstacle_channel> obstacle);
virtual ~EventsI();
virtual void Sense();
virtual void Actuate();
private:
std::shared_ptr<robochart::obstacle_channel> obstacle;
};
//MovementI.h
class MovementI : public HardwareComponent {
public:
MovementI();
virtual ~MovementI();
void Move(double lv, double av);
virtual void Sense();
virtual void Actuate();
public:
int PI;
};
TheMove()function provided by the interface sets the desired linear and angular speed of the robot. In theActuate() function, the desired linear and angular speed is used to calculate the required velocity of the left and right wheels to activate the motor. The classMovementIor EventsI requires the implementation of the functionsSense()andActuate(). This is the wrapper that maps the notions of RoboChart to the native simulation.
Robot
The robot inherits two interfaces:MovementIand EventsI that provide the operationMoveand event in the channelobstacle, respectively.
//Robot.h
class Robot: public MovementI, public EventsI {
public:
Robot(
std::shared_ptr<robochart::obstacle_channel> obstacle);
virtual ~Robot();
void Sense();
void Actuate();
private:
std::shared_ptr<robochart::obstacle_channel> obstacle;
};
The constructor instantiates each of the interfaces, and the functionsSense()andActuate()execute the respective functions of each of the interfaces.
Controller
A controller classContMovement implements a generic Controller class that contains a reference to a state machine.
//ContMovement.h
class ContMovement: public robochart::Controller {
public:
ContMovement(
std::shared_ptr<Robot> R_Robot,
std::shared_ptr<robochart::obstacle_channel> obstacle);
virtual ~ContMovement();
virtual void Execute();
private:
std::shared_ptr<robochart::obstacle_channel> obstacle;
private:
std::shared_ptr<Robot> R_Robot;
};
The ContMovement controller receives pointers to the robot, and one channelobstacle. Thestmfield needs to be set by the module in the Init() function of the module class to avoid issues with circular dependencies.
State Machine
A state machine is a class that inherits from an abstract classStateMachine, instantiates its substates and transitions and links them together. The classes that implement the states and transitions of the machine are presented in the next section.
//StmMovement.h
#define SM_DEBUG
class StmMovement: public robochart::StateMachine
{
public:
std::shared_ptr<robochart::obstacle_channel> obstacle;
public:
std::shared_ptr<robochart::Timer> T;
std::shared_ptr<Robot> R_Robot;
std::shared_ptr<ContMovement> C_ContMovement;
public:
Loc dir;
public:
StmMovement(
std::shared_ptr<Robot> R_Robot,
std::shared_ptr<ContMovement> C_ContMovement,
std::shared_ptr<robochart::obstacle_channel> obstacle);
~StmMovement();
int Initial();
virtual void Execute();
public:
class Moving : public robochart::State
{
public:
Moving(std::shared_ptr<Robot> R_Robot, std::shared_ptr<ContMovement> C_ContMovement, std::shared_ptr<StmMovement> S_StmMovement) : State("Moving"), R_Robot(R_Robot), C_ContMovement(C_ContMovement), S_StmMovement(S_StmMovement)
{
}
void Entry()
{
R_Robot->Move(5, 0);
}
private:
std::shared_ptr<Robot> R_Robot;
std::shared_ptr<ContMovement> C_ContMovement;
std::shared_ptr<StmMovement> S_StmMovement;
};
class Turning : public robochart::State
{
public:
Turning(std::shared_ptr<Robot> R_Robot, std::shared_ptr<ContMovement> C_ContMovement, std::shared_ptr<StmMovement> S_StmMovement) : State("Turning"), R_Robot(R_Robot), C_ContMovement(C_ContMovement), S_StmMovement(S_StmMovement)
{
}
void Entry()
{
if (S_StmMovement->dir == Loc::left)
{
R_Robot->Move(0, 5);
}
else
{
R_Robot->Move(0, -5);
}
}
private:
std::shared_ptr<Robot> R_Robot;
std::shared_ptr<ContMovement> C_ContMovement;
std::shared_ptr<StmMovement> S_StmMovement;
};
class i0 : public robochart::State
{
public:
i0(std::shared_ptr<Robot> R_Robot, std::shared_ptr<ContMovement> C_ContMovement, std::shared_ptr<StmMovement> S_StmMovement) : State("i0"), R_Robot(R_Robot), C_ContMovement(C_ContMovement), S_StmMovement(S_StmMovement)
{
}
private:
std::shared_ptr<Robot> R_Robot;
std::shared_ptr<ContMovement> C_ContMovement;
std::shared_ptr<StmMovement> S_StmMovement;
};
public:
class t1 : public robochart::Transition {
private:
std::shared_ptr<Robot> R_Robot;
std::shared_ptr<ContMovement> C_ContMovement;
std::shared_ptr<StmMovement> S_StmMovement;
std::shared_ptr<robochart::obstacle_event> reg_obstacle_event;
public:
t1(std::shared_ptr<Robot> R_Robot, std::shared_ptr<ContMovement> C_ContMovement, std::shared_ptr<StmMovement> S_StmMovement, std::weak_ptr<robochart::State> src, std::weak_ptr<robochart::State> tgt):
robochart::Transition("S_StmMovement_t1", src, tgt), R_Robot(R_Robot), C_ContMovement(C_ContMovement), S_StmMovement(S_StmMovement), reg_obstacle_event(nullptr)
{}
void Reg() {
if (reg_obstacle_event == nullptr) {
reg_obstacle_event = S_StmMovement->obstacle->Reg("StmMovement", robochart::Optional<Loc>());
}
}
bool Check() {
Reg();
if (S_StmMovement->obstacle->Check(reg_obstacle_event) == true) {
#ifdef SM_DEBUG
printf("TREATING EVENT obstacle\n");
#endif
S_StmMovement->dir = std::get<0>(*reg_obstacle_event->GetOther().GetValue().lock()->GetParameters()).GetValue();
ClearEvent();
return true;
}
else {
Cancel();
return false;
}
}
void Cancel() {
if (reg_obstacle_event != nullptr) {
S_StmMovement->obstacle->Cancel(reg_obstacle_event);
reg_obstacle_event = nullptr;
}
}
void ClearEvent() {
S_StmMovement->obstacle->AcceptAndDelete(reg_obstacle_event);
reg_obstacle_event = nullptr;
}
void Action() {
S_StmMovement->T->SetCounter(0);
#ifdef SM_DEBUG
printf("Resetting Clock T\n");
#endif
}
};
public:
class t2 : public robochart::Transition {
private:
std::shared_ptr<Robot> R_Robot;
std::shared_ptr<ContMovement> C_ContMovement;
std::shared_ptr<StmMovement> S_StmMovement;
public:
t2(std::shared_ptr<Robot> R_Robot, std::shared_ptr<ContMovement> C_ContMovement, std::shared_ptr<StmMovement> S_StmMovement, std::weak_ptr<robochart::State> src, std::weak_ptr<robochart::State> tgt):
robochart::Transition("S_StmMovement_t2", src, tgt), R_Robot(R_Robot), C_ContMovement(C_ContMovement), S_StmMovement(S_StmMovement)
{}
bool Condition() {
if (S_StmMovement->T->GetCounter() >= R_Robot->PI) {
#ifdef SM_DEBUG
printf("Condition of transition S_StmMovement_t2 is true\n");
#endif
return true;
}
else {
#ifdef SM_DEBUG
printf("Condition of transition S_StmMovement_t2 is false\n");
#endif
return false;
}
}
};
public:
class t0 : public robochart::Transition {
private:
std::shared_ptr<Robot> R_Robot;
std::shared_ptr<ContMovement> C_ContMovement;
std::shared_ptr<StmMovement> S_StmMovement;
public:
t0(std::shared_ptr<Robot> R_Robot, std::shared_ptr<ContMovement> C_ContMovement, std::shared_ptr<StmMovement> S_StmMovement, std::weak_ptr<robochart::State> src, std::weak_ptr<robochart::State> tgt):
robochart::Transition("S_StmMovement_t0", src, tgt), R_Robot(R_Robot), C_ContMovement(C_ContMovement), S_StmMovement(S_StmMovement)
{}
};
};
A state machine is essentially treated as a composite state with a vector of substates. Notice that the instantiation of state machine is incomplete. It is declared without its substates and transitions in order to simplify the constructor and also due to a circular dependency between states and transitions. Therefore, in the constructor of the state machine, its substates should be instantiated.
States should be instantiated bottom up, and transitions should be instantiated after the source and target states are instantiated, and added to their respective source states.